
GARD Les poses de prothèses assistées par un robot : un haut niveau de précision et d’expertise au CHU de Nîmes

Depuis décembre 2018, le service de chirurgie orthopédique du centre hospitalier universitaire de Nîmes procède à la pose de prothèses totales et partielles ou totales du genou, assistées par le robot Mako.
Le CHU de Nîmes est le seul de France à utiliser ce robot pour la chirurgie prothétique hanche et a été un des pionniers de cette assistance pour la pose des prothèses de genou. Le robot chirurgical permet au chirurgien une implantation plus précise et reproductible des différents composants prothétiques.
Les données anatomiques du patient sont saisies à l’avance via un scanner réalisé 15 jours avant l’intervention et fusionnés en temps réel durant la chirurgie par le robot via un repérage de ces mêmes structures anatomiques durant la procédure chirurgicale. Ceci évite les malpositions d’implants et réduit ainsi les risques secondaires de luxations, d’usures, de descellements ou de conflits avec les muscles entourant la prothèse.
Ainsi la prothèse est positionnée avec une précision inégalée lors de l’intervention. Le jour de l’intervention, la chirurgie est réalisée par l’orthopédiste, avec l’aide du robot et la participation d’un ingénieur qui modélise en direct et en trois dimensions, les données préopératoire et peropératoires anatomiques du patient.
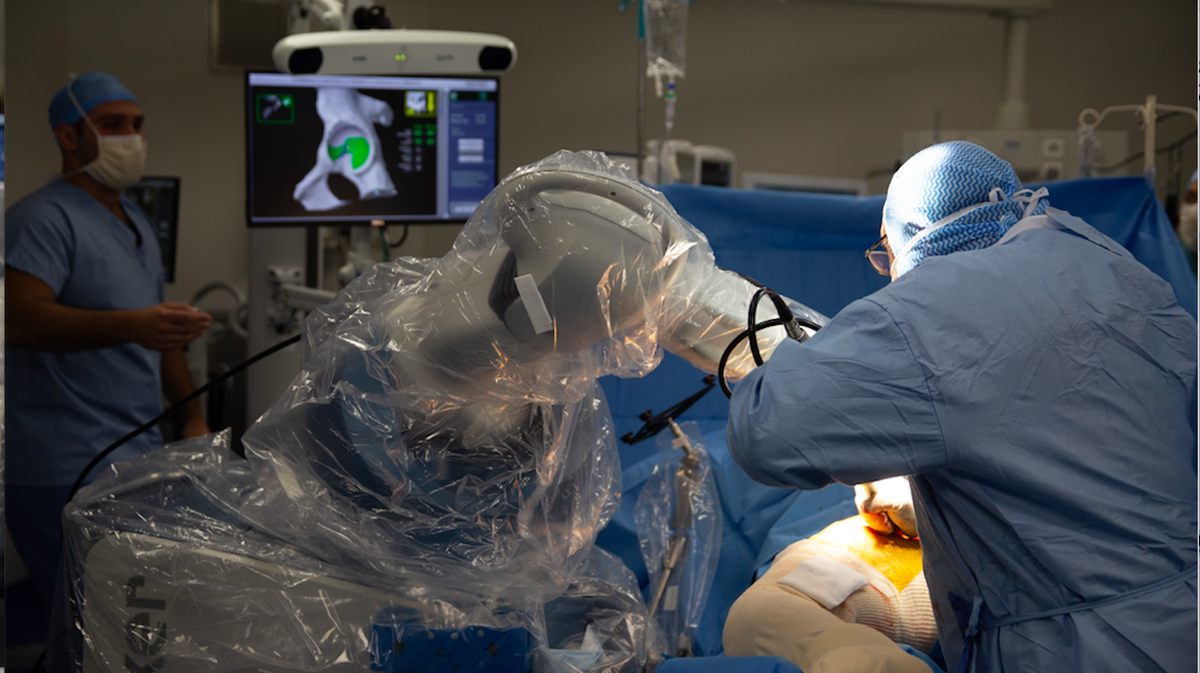
« D’un point de vue technique ce robot utilise une technique dite haptique qui consiste en un double contrôle, explique le professeur Pascal Kouyoumdjian, chef du service de Chirurgie orthopédique du CHU de Nîmes. Le chirurgien contrôle le robot en temps réel et le robot contrôle la main du chirurgien pour la réalisation de la préparation osseuse et le positionnement des implants pendant l’intervention. Il s’agit d’un couplage entre un système de navigation préopératoire et l’utilisation d’un bras robotisé à des fins d’exécution des paramètres planifiés. »
Cette technique s’intègre par ailleurs parfaitement aux chirurgies mini-invasives et protocole de récupération précoce mise en place par l'établissement nîmois. Cette technologie pourra permettre une amélioration des suivis des patients à court, moyen et long terme notamment par le biais de la limitation des complications où la malposition des implants occupe une place importante.























